
ロボット・装置の省配線ソリューション事例
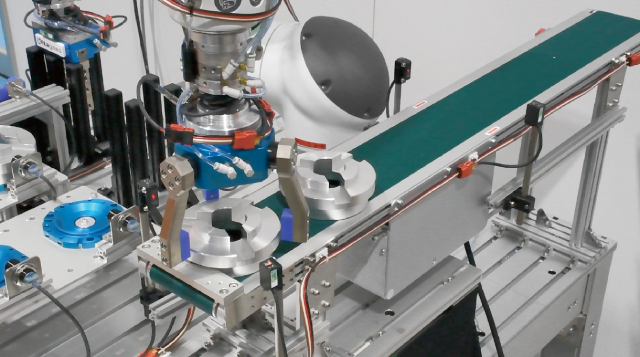
ロボットハンド・ワーク搬送周辺の省配線化
【課題】
- 高機能化ニーズに対応するためのハンドI/Oや、ロボット周辺制御での煩雑な配線
- 多芯ケーブルの外装による可動範囲への制限や、揺動による断線リスクの増大
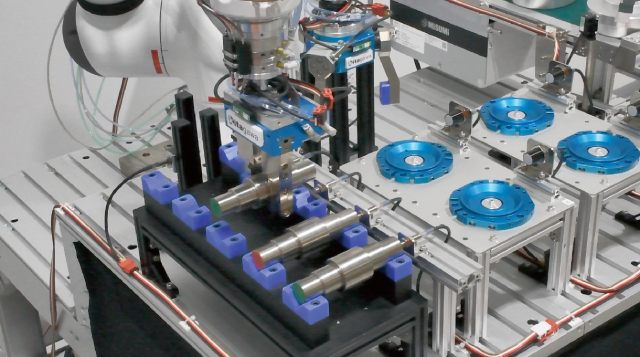
- ロボット作業の多様化に伴うハンドバリエーションの増加で、装着ハンドの管理や交換工数などの影響を受け稼働効率が低下



【解決】
- ハンドI/Oおよびロボット周辺制御をAnyWireASLINKで一本化
- 内装ケーブルを使ったネットワーク制御により、可動範囲への制限解消や、断線リスクの低減を実現
- ロボットハンド交換時に便利なツールアンサーユニットにより、稼働効率の低下を抑制