
製品構成
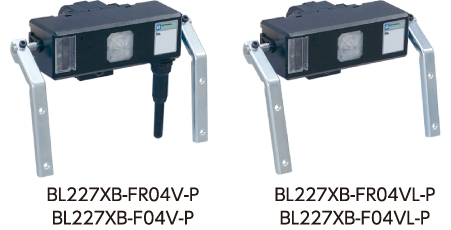
指示:扉開閉+LED(選択) 応答:レバースイッチ方式・光電方式下方反射タイプ
◆レバースイッチ方式
| 表示・指示 | 応答・検知 | I/O点数 | 消費電流 (mA) |
取付 | 外形 寸法 |
型式 | 標準価格(¥) | プロダクト ガイド |
CAD (平面図) |
||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 入力 | 出力 | 伝送側 | I/O側 | ||||||||
 |
レバースイッチ | 2 | 1 | 1.5 | 待機31 動作580 |
φ28パイプ | 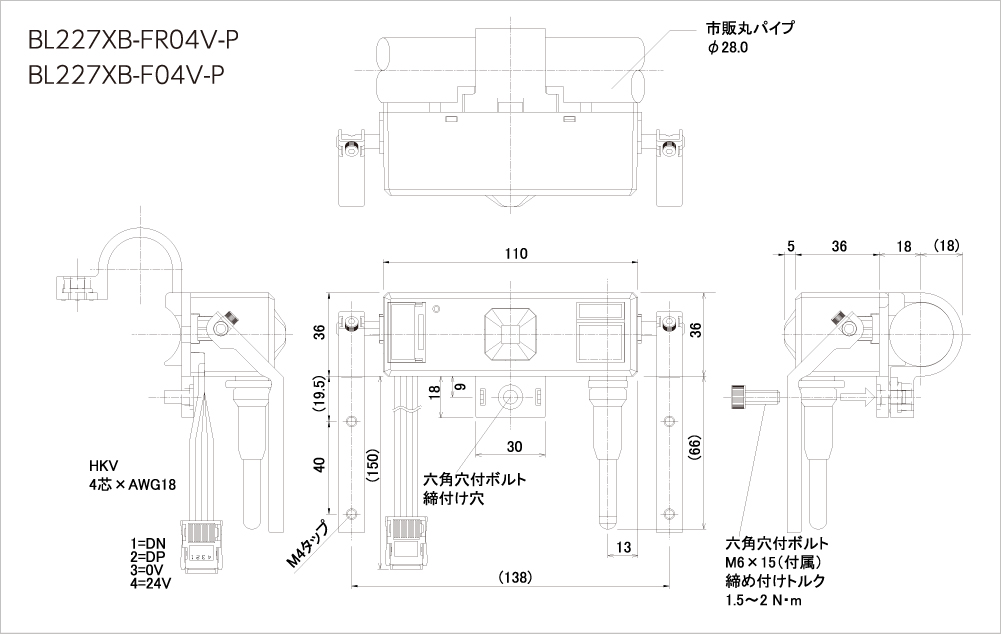 |
BL227XB-FR04V-P | 58,200 | ||
 |
レバースイッチ | 2 | 2 | 1.5 | 待機31 動作580 |
φ28パイプ | |
BL227XB-F04V-P | 58,200 | ||
 |
レバースイッチ | 2 | 4 | 1.5 | 待機31 動作580 |
φ28パイプ | |
BL227XB-F08M-P | 58,200 | ||
◆光電方式下方反射タイプ
| 表示・指示 | 応答・検知 | I/O点数 | 消費電流 (mA) |
取付 | 外形 寸法 |
型式 | 標準価格(¥) | プロダクト ガイド |
CAD (平面図) |
||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 入力 | 出力 | 伝送側 | I/O側 | ||||||||
|
下方反射 | 2 | 1 | 1.5 | 待機31 動作580 |
φ28パイプ | 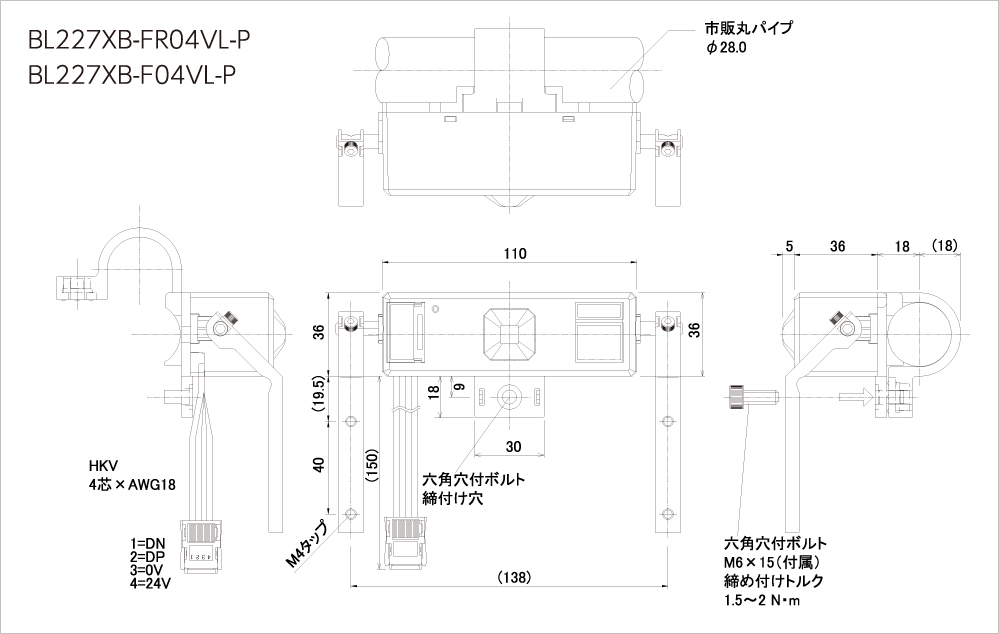 |
BL227XB-FR04VL-P | 62,000 | ||
|
下方反射 | 2 | 2 | 1.5 | 待機31 動作580 |
φ28パイプ | |
BL227XB-F04VL-P | 62,000 | ||
※上記型式には「H」ホルダが標準搭載されています。
※「H1」ホルダを搭載する場合は、標準型式の末尾に「-H1」を付加してください。(標準価格に変更はありません)
※「SUS」ホルダを搭載する場合は、標準型式の末尾を「-P」から「-PS」に変更してください。(標準価格についてはお問い合わせください)
アドレスライタにより「アドレス」「扉アーム上下角度」「扉アーム下げ動作遅延時間」の設定が出来ます。
※「扉アーム上下動作の速度設定」は出来ません。
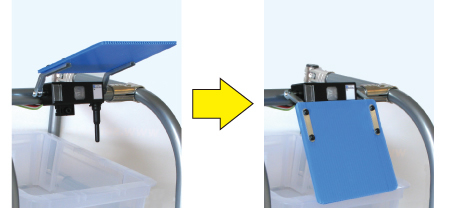
□アームの上下角度
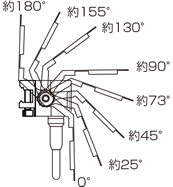
アームの上下角度は、約180°まで7段階に設定出来ます。棚やワークに扉がぶつかってしまう場合への調整が可能になります。
アドレスライタの角度設定モードで、おおよそ扉を止めたい位置の番号を書き込んでください。
※角度はおおよそで、厳密に角度指定をすることは出来ません。
□アーム下げの遅延時間

アームは、扉を開く操作(出力ON)をすることで設定角度まで上昇し、その後、扉を閉じる操作(出力OFF)をした後に一定時間遅延して元の位置まで下降します。
扉を閉じる操作(出力OFF)から下降までの遅延時間(0~10秒)は上記の表の通り11段階に設定することが出来ます。
◆オプション
| 製品仕様 | 取付 | 外形 寸法 |
型式 | 標準価格(¥) |
|---|---|---|---|---|
| 「H」ホルダ φ28パイプ取付ホルダ下締付タイプ(5個入) | φ28 パイプ | A027-HP28-5P | 3,180 | |
| 「H1」ホルダ φ28パイプ取付ホルダ裏締付タイプ(5個入) | φ28 パイプ | A027-HP28-H1-5P | 3,180 | |
| 「SUS」ホルダ SUSパイプ取付ホルダ(ホルダ単体: 1個入) | SUS パイプ | A027-HP-SUS2 | 1,280 | |
| 交換用ゴムレバーセット(カバー、レバー、リング 各5個入) | ターミナル | ― | A027-LES-01-5P | 6,340 |
※φ28 パイプ取付ホルダはポカよけターミナル(φ28 パイプ取付タイプ)に付属します。単体部品は取付変更時、補修時用のオプションです。
◆アドレスライタ

| 製品仕様 | タイプ | 外形 寸法 |
型式 | 標準価格(¥) | プロダクト ガイド |
CAD (平面図) |
|---|---|---|---|---|---|---|
| アドレスライタ(汎用) | 非接触式 | ARW-04 | 47,600 | |||
| アドレスライタ用 赤外線リモートヘッド | 非接触式 | ― | ARW-RH | 7,920 | ||
| アドレスライタARW-04+赤外線リモートヘッド | 非接触式 | ― | ARW-04-RH | 52,800 | この製品は上記二つのセット型式です |
※価格はすべて消費税抜きです。
▲ ページTOPへ